Teensy – Panda PC
7. Juni 2023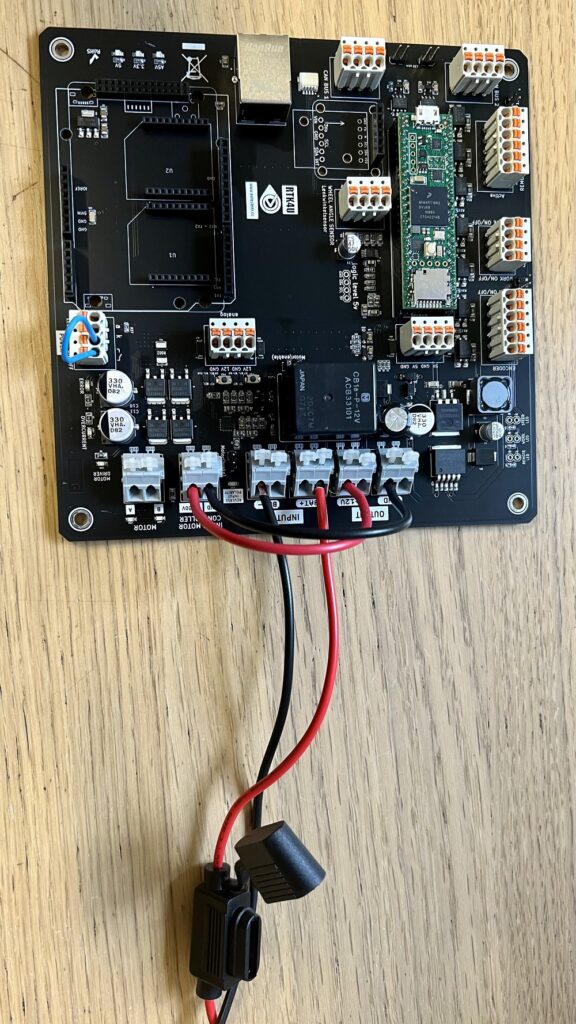
PCB Details:
- Arduino Teensy mit Ethernet
- ADS1115
- Ardusimple simpleRTK2B Steckplatz
- Ardusimple Micro im Xbee Format (2 Steckplätze für Position und Heading)
Es kann für Dual Heading auch ein F9P im Uno und ein zweiter im Xbee Format verwendet werden. - Septentrio Steckplatz
- Bynav Steckplatz
- Motor Controller Integriert
- Verpolschutz
- Schutz der Eingänge mit Optokoppler
- I2C – über Wago und QWICC Connector
Versorgungspannung der Platine
- 12-15 V vorher mit 10A absichern
Eingänge
- Ein / Aus Schalter
- 4 Digitaleingänge (3+1 Interrupt) Spannungslos GND auf GND Schalter für Lenken, Arbeit, Remote
- 3 Digitaleingänge 12 für Lenken, Arbeit, Remote
- Lenkwinkelsensor
- 2 x Analog 0-5 V
- 2 x Ananlog 0-12V
Ausgänge
- 5 V – max 800 mA
- 12 V (Eingangsspannung) max 2 A
- Output für Motorcontroller = Eingansspannung
- 2 x Can Bus
- Ethernet zum Betrieb
Elektrische Daten
- Versorgungs 12 V to 15 V DC
- Stromaufnahme 200 mA bei 13.0 V (ohne Motor)
- Ausgang für 5 V DC und 12 V DC
- Abmessungen
- 160 mm x 120 mm x 35 mm (l x b x h)
- Arbeitsumgebung
- Arbeitstemperatur −40 °C to +85 °C
- Lagertemperatur −40 °C to +85 °C
- RoHS conform
Anschlüsse
USB Anschluss
Der USB Anschluss am Teensy wird nur zum Programmieren benötigt.
Spannungsversorgung der Platine
Mit 12 V vom Traktor – 10 A absichern.
Die Sicherung wird immer direkt am Stecker gesetzt und soll die Leitung schützen.
Nimmt man Strom direkt an der Batterie gehört die Sicherung dort gesetzt, benutzt man die 3 Polige Traktorsteckdose dann sofort beim Stecker.
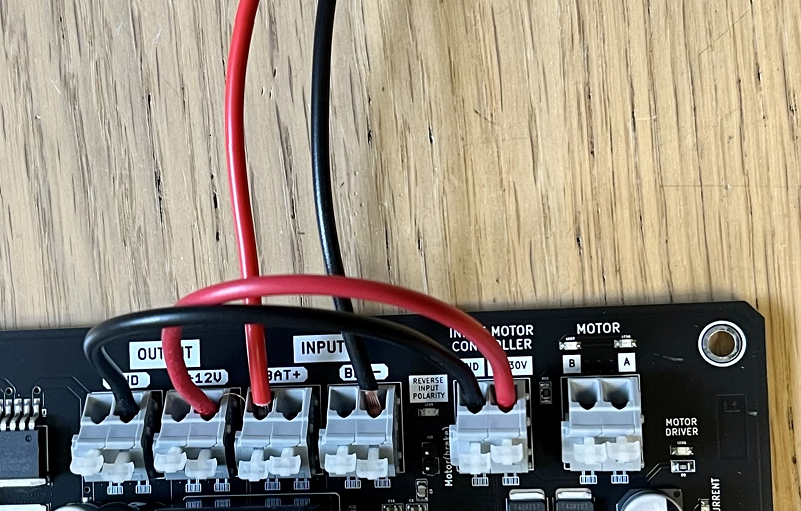
Beschriftung INPUT BAT + und BAT-
12 V vom Traktor (Spannung am Traktor ist zw. 12-14 Volt)
Die Brücke von Output zu Input M versorgt den Motorkontroller mit Strom nachdem das Relais angezogen hat.
Zwischen Output zu Input Motorcontroller kann man eine 12 V zu 24 V StepUp geben um den Motor gegebenfalls mit 24 V zu betreiben (dreht schneller)
Output M ist der Anschluss für den Lenkmotor
Einschalter ON/OFF
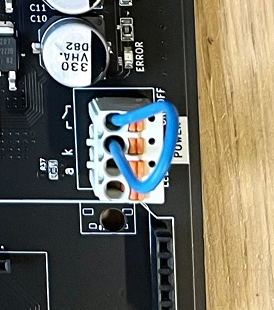
Die Bücke bei On/off schaltet das Board ein – das Schwarze Relais zieht dann an und der Motorcontroller bzw der 12 V Ausgang hat Strom.
Hier kann man einen externen Schalter verbauen.
Daneben ist ein Anschluss für ein Led.
Eingänge – Analog
Steer on/off s auf gnd
Schalter zum aktivieren der Lenkung (Spannungsfrei – Masse zu Masse)
Dieser Kontakt ermöglicht das Lenken. Dieser kann zb über eine Microschalter beim Motor geführt werden welcher beim wegklappen den Motor ausschaltet.
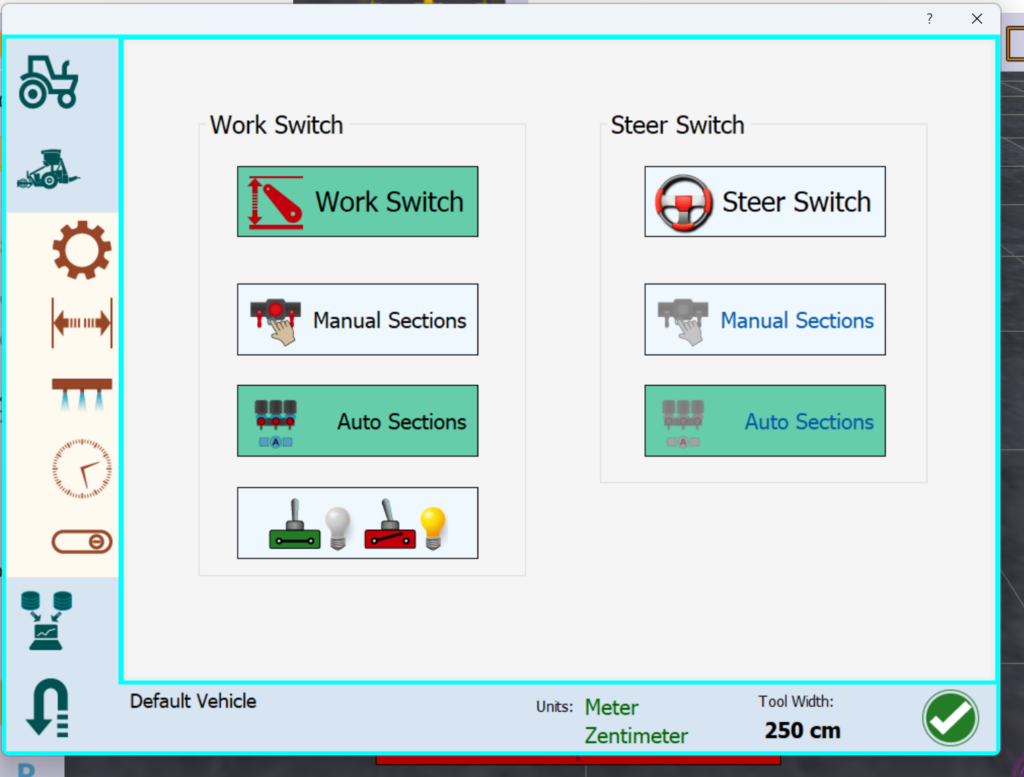
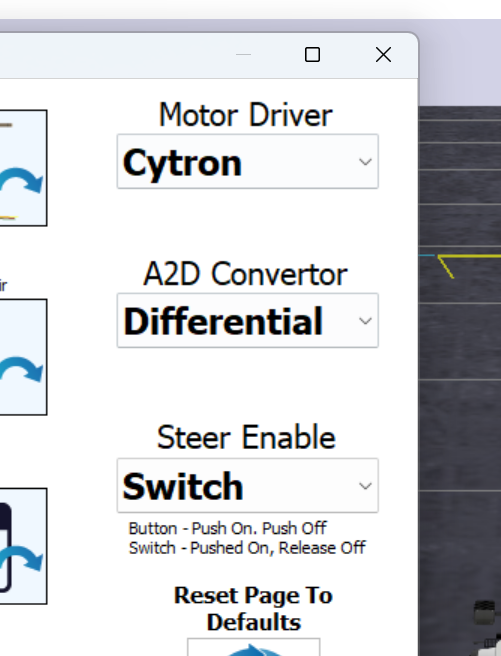
Der Switch muss in der Module Konfig in AgOpen auf Switch eingestellt werden!
Ein grüner Punkt == Lenken aktiv – bedeutet ein geschlossener Schalter
Traktor Symbol
Grün : Lenken aktiviert
Rot : Lenken aus
Orange: keine Spur
Work on/off s auf gnd
Schalter zum aktivieren der Aufzeichnung (Spannungsfrei – Masse zu Masse)
Muss in der AgOpen Konfig entsprechend eingestellt werden.
Brücke S+W
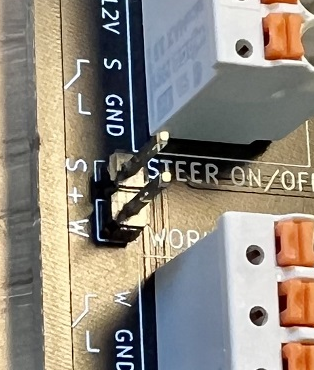
Aktiviert die Aufzeichnung mit dem Lenken gemeinsam
12 V Eingänge für Work/Steer

Will man Steer/ Work / Remote mit einem 12 V Signal aktivieren benutzt man diese Anschlüsse.
Achtung: Es muss immer 12 V und GND vom externen Schalter verwendet werden!
Lenkwinkelsensor
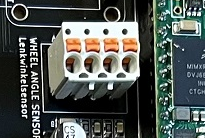
5V und GND als Versorgung für den Sensor
Das Signal vom Sensor auf Singnal.
Verwendet man einen bestehenden Lenkwinkelsensor bitte vorher das Signal mit einem Multimeter testen.
MAXIMAL 5 V – in der Regel haben die Sensoren einen Bereich von 0.5 – 4.5 V. Bitte immer vorher testen.
Die meisten Sensoren haben auch eine bestimmten Auslesebereich. Meisten direkt beim Stecker bzw genau Gegenverkehrt – auch vorher testen.
Bei vorgerüsteten Sensoren braucht man GND und Signal vom Sensor.
Signal auf Signal und GND wird mit A1 verbunden.
In der Software nutzt man differential Read. (a2d Converter)
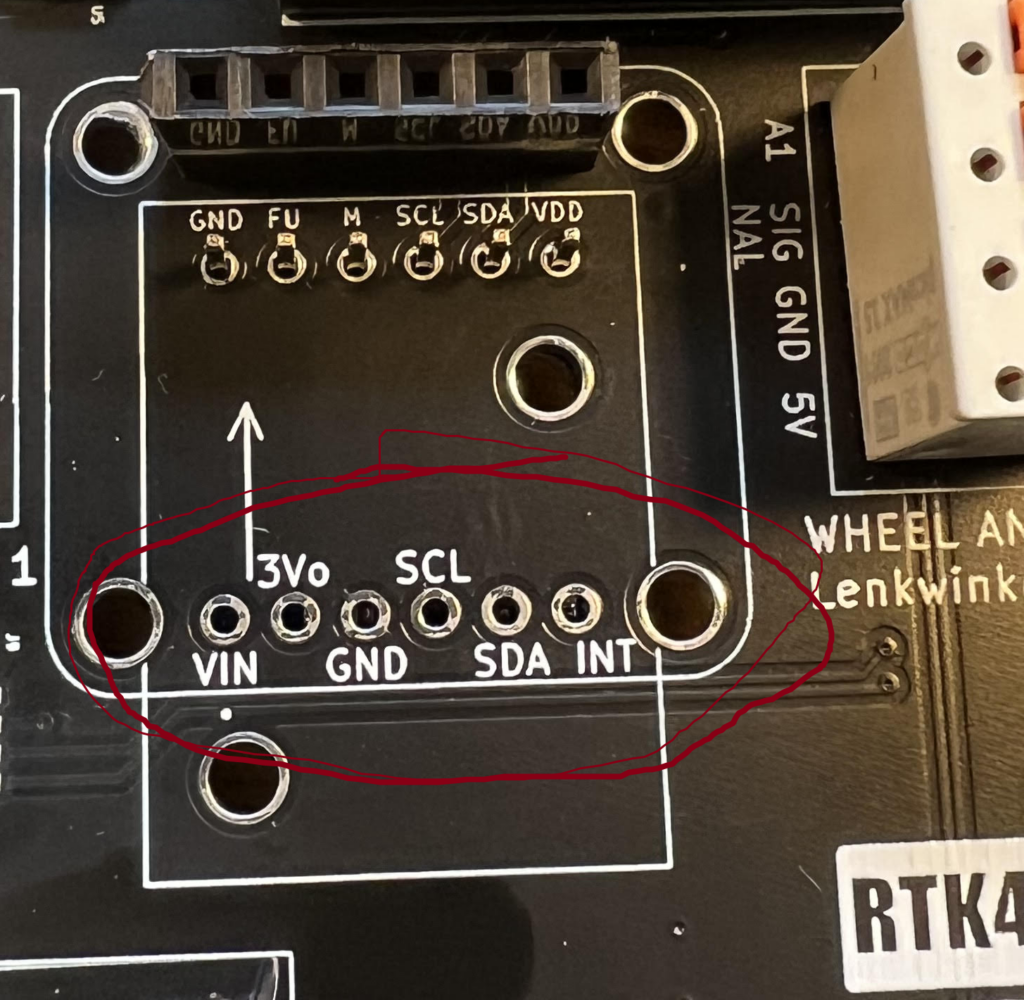
Anbindung Kompass und Neigunssensor
Das interne Modul wird über den QWICC stecker mit der Hauptplatine oder der Relaisplatine verbunden.
12 V und 5 V Analogeingänge

| Ampere Sensor 0-5 V | 41 |
| Pressure Sensor 0-5 V | 24 |
| 12 V input | 26 |
| 12 V input | 27 |
Code muss selber angepasst werden.
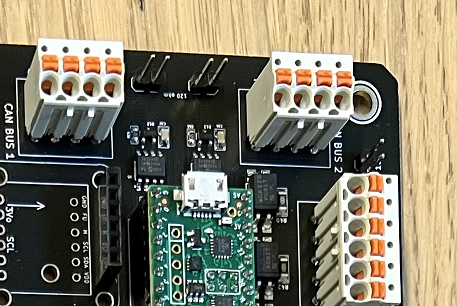
CAN Bus
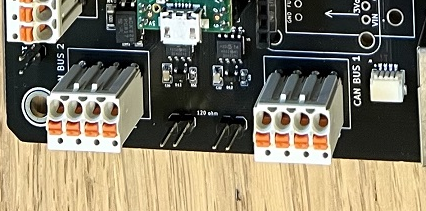
Die Anschlüsse sind falsch beschriftet. CAN1 = Can2 in der Software
120 Ohm Resistor ist auf der Platine verbaut. Wenn man die Jumper setzt sind sie aktiviert. (Wird normal nicht gebraucht)
Kompass und Neigungssensor
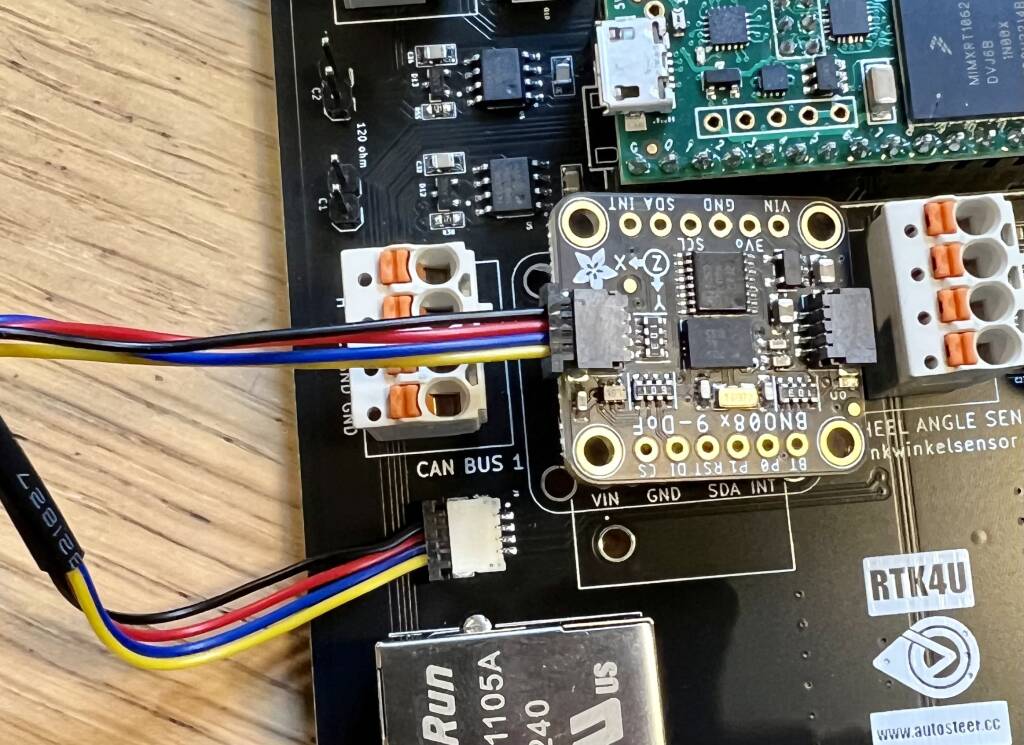
Der Bno085 wird per I2C Qwicc Stecker verbunden. In der Software muss der IMU Bus auf Wire1 gestellt werden. Mache ich normal bei der Auslieferung.
UART – RVC Mode
Wir noch nicht unterstützt. Lötpunkte sind da und gehen auf UART5
Außerdem muss ein Lötpunkt am Bno085 gesetzt werden.
CMPS14
Kann von unten Montiert und verlötet werden.
GNSS Receiver
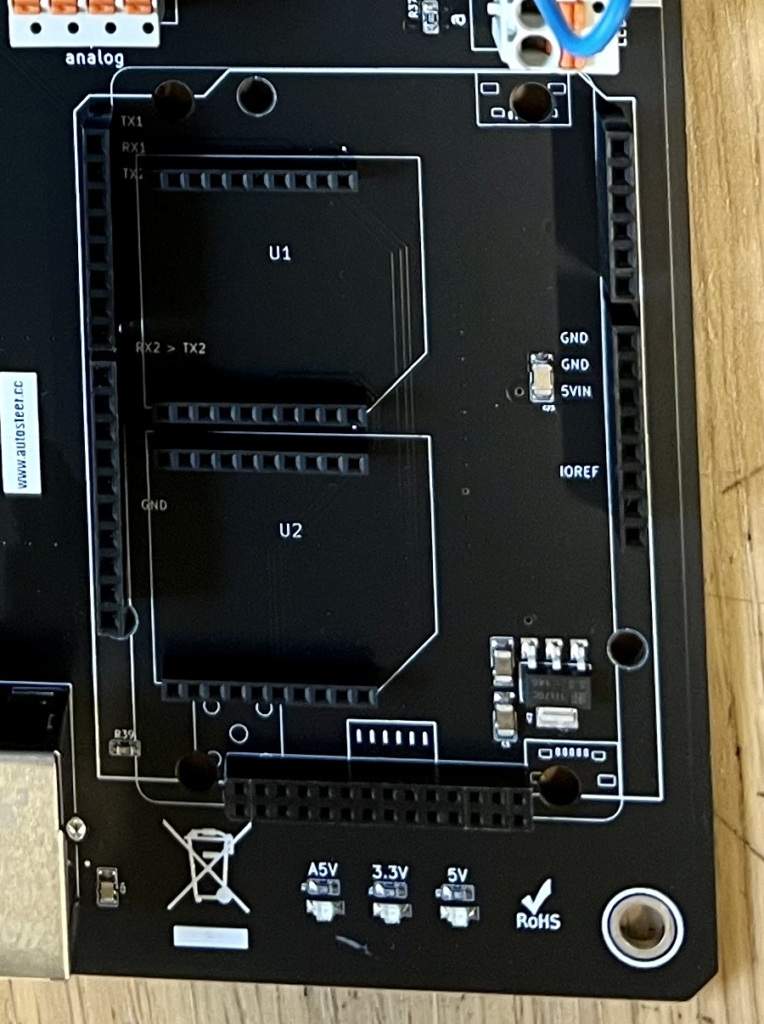
Steckplatz im UNO Format für Septentrio oder F9P Single / Positionsreceiver (bei Dual)
U1 F9P micro Postion
U2 F9P micor Heading
Lange Leiste Bynav