Hardware von V4 auf V5 aufrüsten
10. September 2021am Beispiel meiner alten Platine:
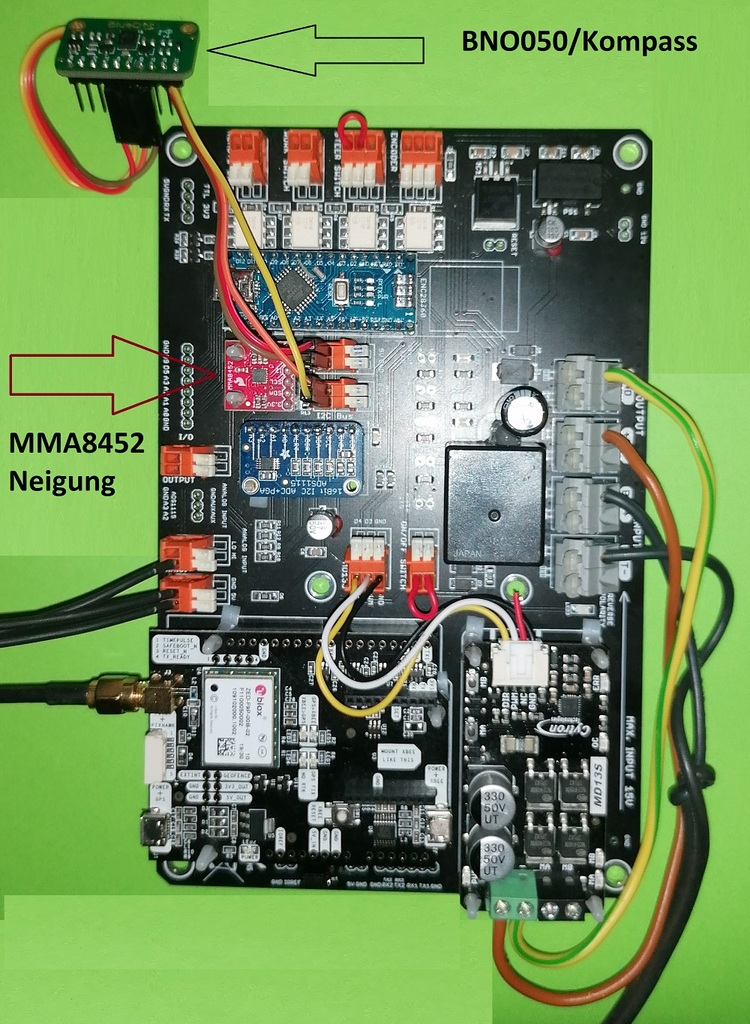
* MMA8452/Neigungsensor entfernen
* Bno050 entfernen
- CMPS14 am i2c Bus anschließen (hier kaufen + Anschlussplan) 5V, SDA, SCL und GND Pin verwenden – Fahrtrichtung beachten – die alten Anschlüsse für den Bno050 verwenden.
oder - https://www.autosteer.cc/produkt/cmps14-kompass/ verwenden.
Hier wird das interne Modul mit dem i2c Anschluss verbunden dann geht man mit dem Netzwerkkabel zum externen Teil welches in einer Box verbaut ist.
Vorteil:
– die Autosteer box kann dann in jeder Lage verbaut werden
– den Kompass kann man in einer ruhigen Lage verbauen (ohne andere Kabel und Eisen) – Fahrtrichtung beachten.
- Autosteer USB – Sketch am PCB aufspielen
Achtung die Anzeige (Serieller Monitor) in der Arduino IDE verhält sich dann anders!
Zuerst versucht der Arduino den neuen Sensor zu finden und prüft auf CMPS14 und auf BNo085 und bestätigt das Vorhandensein.
Dann erscheint in der nächsten Zeile nur mehr ein Zahlen/Buchstaben Wirrwarr (Binäre Daten) – das ist OK.
- AGIO öffnen und mit GPS und Autosteer PCB verbinden. Ntrip einrichten. AgOpen Gps öffnen.
Die Daten vom Kompass und Neigung werden automatisch übernommen und angezeigt.